- A multi-directional heuristic search algorithm that performs simultaneous searches rooted at a set of key states distributed throughout the configuration space.
- Theoretical analysis establishing completeness and bounded suboptimality with respect to discretization guarantees.
- A principled strategy for selecting key states (graph roots) to identify promising regions for avoiding collisions.
- Extensive simulation experiments and real-world demonstrations showing improved performance and reliability over traditional baselines.

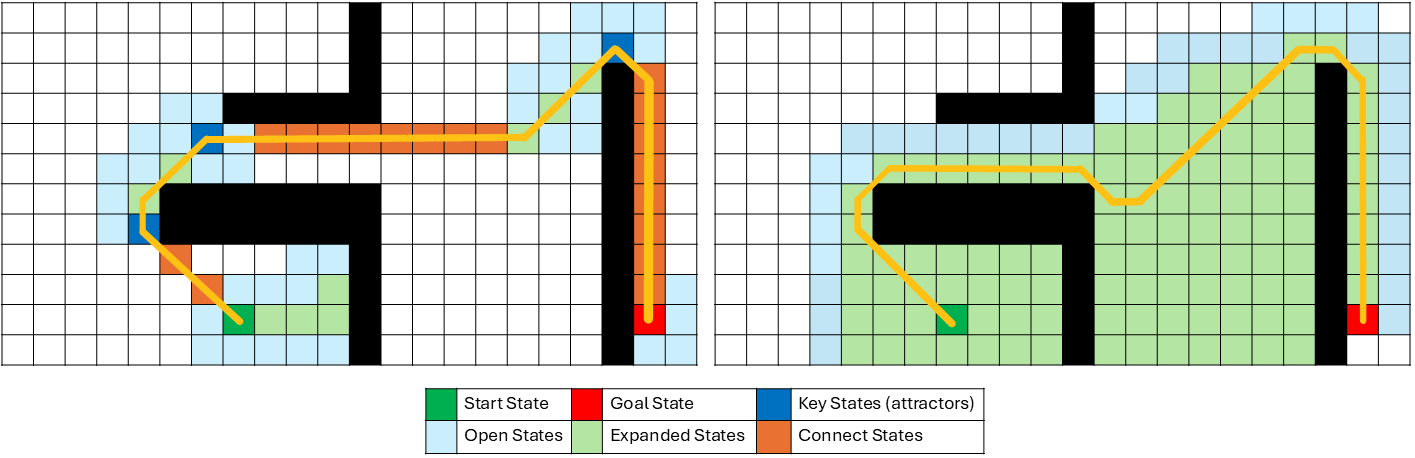
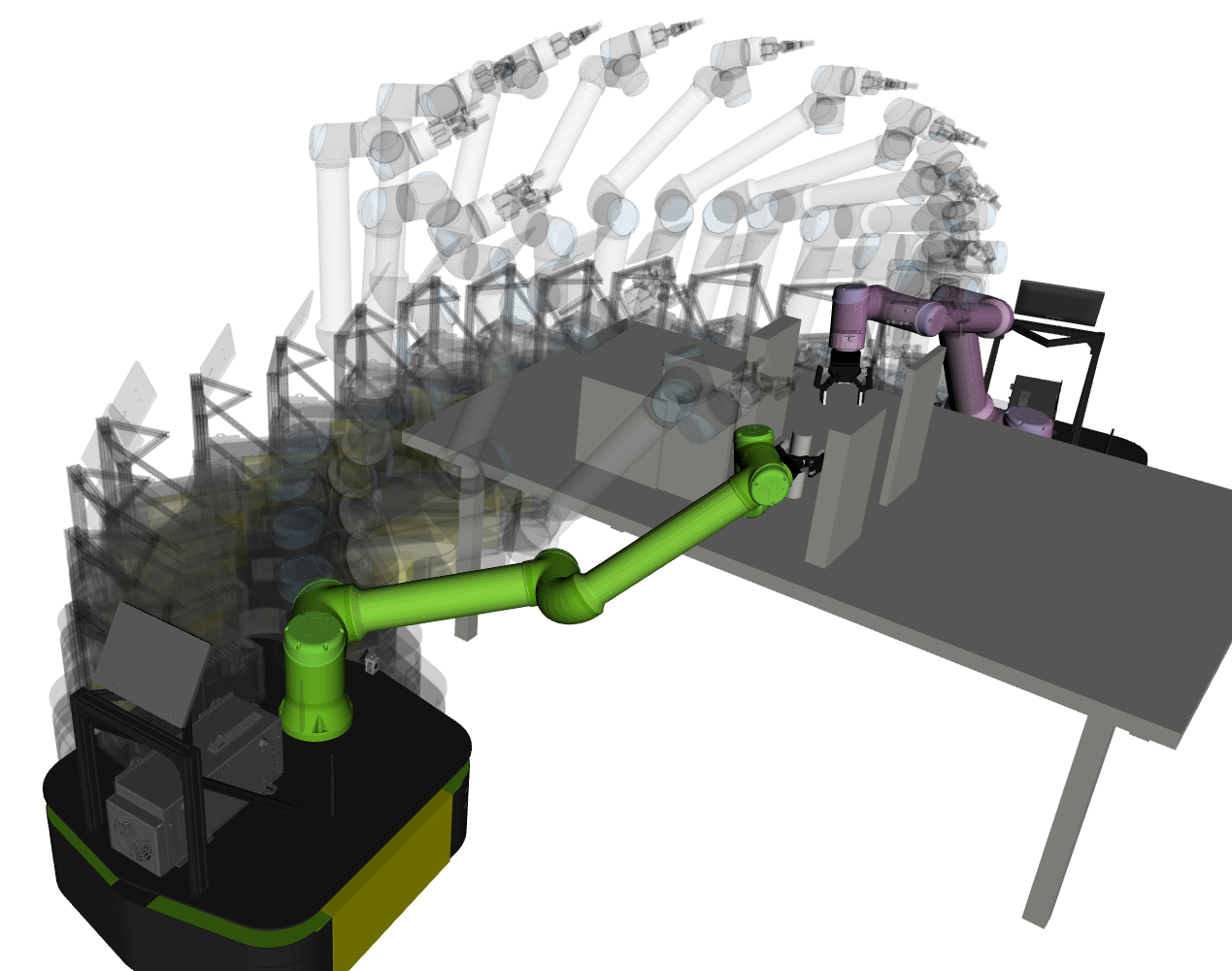
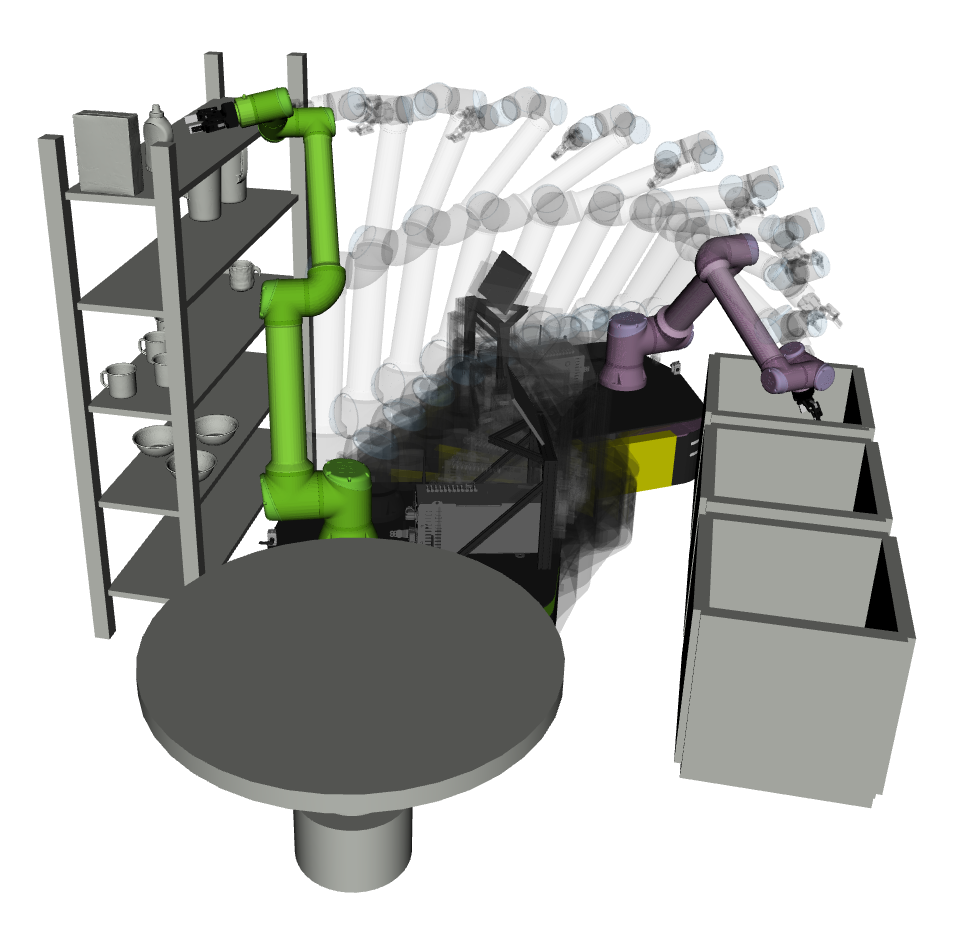
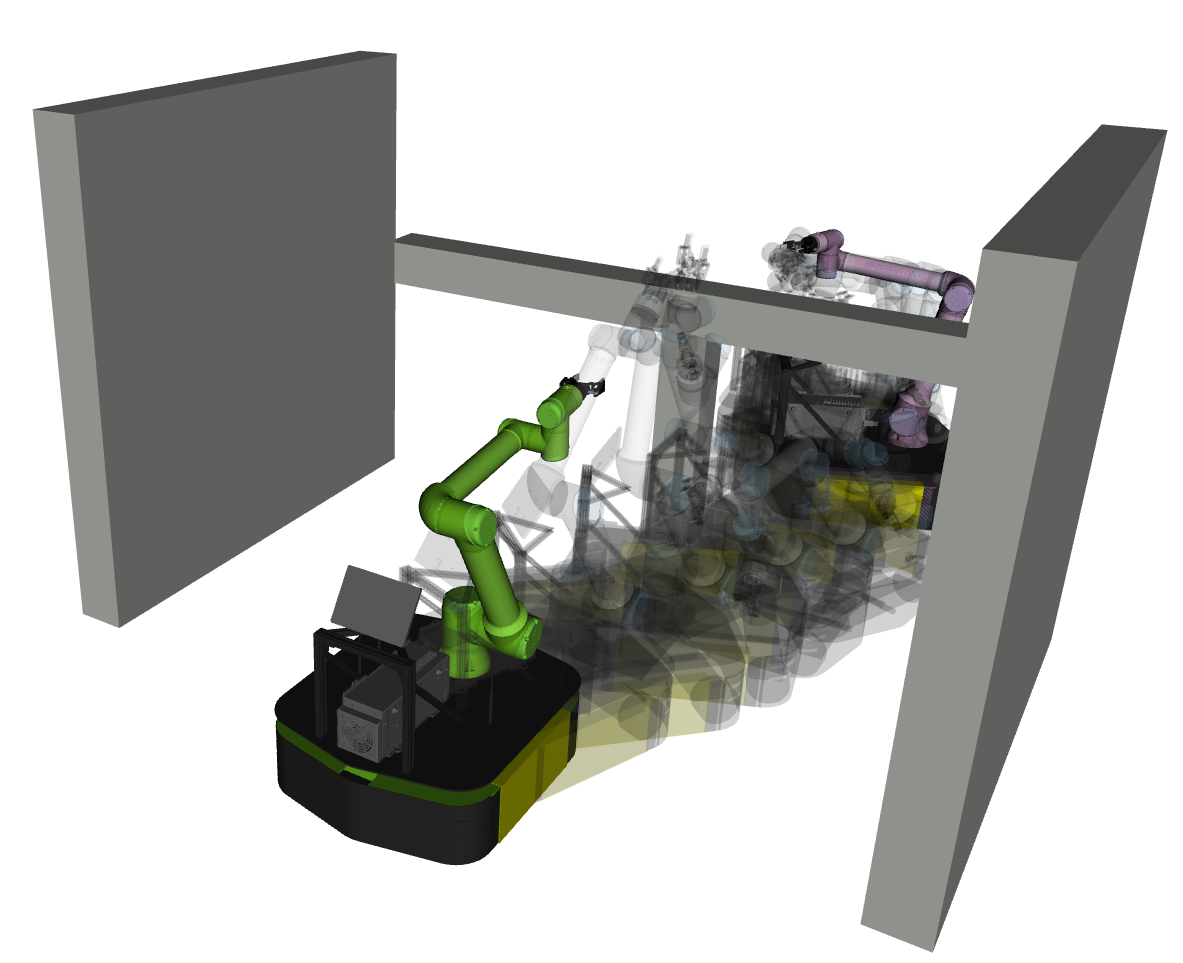
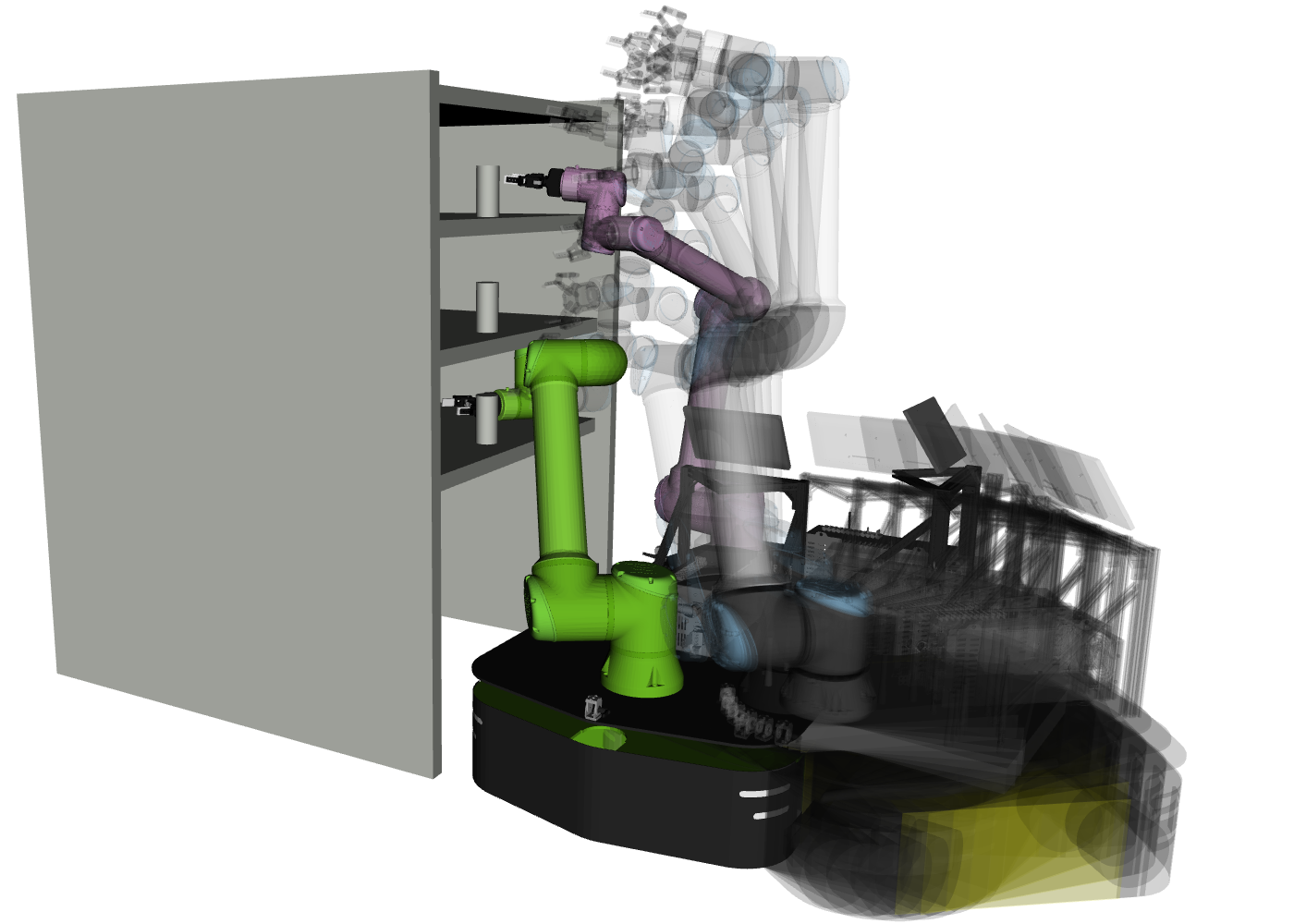
Left: Mobile manipulators in warehouse settings demand efficient, predictable motion planning. Middle: MGS anchors search at key states and grows multiple subgraphs simultaneously, yielding a solution with a substantial reduction in search efforts. Right: Weighted-A* expands significantly more states to solve the same problem.